Title: PLC BASED VIRTUAL INTERACTION USING VIRTUAL SENSORS AND ACTUATORS
Authors: V.Sriharsha, M.Anusha Reddy & N.V.S.L.Aishwarya, 3rd Year BTech, Department of Electronics Engineering
Guide: N.Dinesh kumar, HOD, Electronics engineering
College: Vignan institute of technology and sciences
ABSTRACT:
This paper proposes a programmable logic controller (PLC) based virtual interaction training system using virtual sensors and actuators. The proposed system is composed of four components including virtual sensors, virtual actuators, virtual PLC, and virtual networks. The Proposed system is applied to a real training program of the industry’s training center to examine the applicability and feasibility.
1. INTRODUCTION:
Moving on to the rapid developments in manufacturing industries with automated facilities the PLC training is becoming more costly. Because of the latest and expensive equipment, malfunctioning can result in big loss, including personal injuries, equipment damages, manufacturing of defect products, and a pause for production process. Therefore, there is a strong demand for effective and accurate training that can provide trainees with quick and safe ways to adapt to the latest equipment.
In the top most manufacturing industries like Hyundai, TATA, Samsung, requires very expensive and latest equipments, the programming errors may damage the equipment very badly, and also repeated substitutions to the recent trends is also difficult, there fore most trainees aren’t undergoing the practical manipulations.
In accordance to the recent developments in the manufacturing industries this PLC training system provides PLC trainees with a virtual interaction which is similar to actually handling various types of equipment.
The proposed system is composed of three components including virtual sensor (for interacting between user and input devices), virtual actuator (for manipulating and controlling device or equipment), and virtual PLC (for programming and generating command).virtual sensor components sense trainee’s wiring and device inputs, and once it is determined by virtual PLC whether or not they are accurate, the virtual PLC generates command for the correction action, and thus virtual actuator (output device) simulates the corresponding action, whereas incorrect one produces a simulation result of faulty action.
2. PROPOSED INTERACTION BASED PLC TRAINING SYSTEM:
To reflect the needs of the industry, this section describes the PLC training system developed to provide virtual interaction using virtual sensors and actuators. This system provides training activities in a controlled virtual environment,
The quality of the virtual interaction based PLC training system depends not only on the similarity between the hardware environment and the practical environment, but also on the verisimilitude degree of reaction and the reasonability of training subjects.
a. SYSTEM OVERVIEW:
The proposed system mainly consists of four components
(i) Virtual sensor
(ii) Virtual PLC
(iii) Virtual actuator
(iv) Virtual network
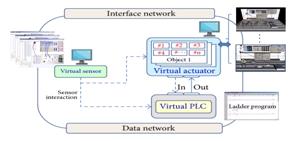
Fig 1.Interaction based PLC training system
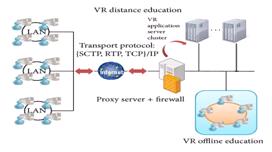
Fig 2. Training network using proposed system
(i) VIRTUAL SENSOR:
The virtual sensor has two units: the object-based sensor input unit and the virtual composer unit. The object-based sensor input unit has role in sensing and processing the sensor input and the virtual composer unit has a role in receiving user’s (trainee’s) arbitrary wiring input. This virtual composer unit receives the initial input from the user (trainee) and supports arbitrary wiring. Whereas most input wiring units accept only pre assigned (correct) wiring, the virtual composer unit in the proposed system accepts any wiring configuration (even incorrect wiring) from the user. The trainee can also study materials related to a specific session and practice wiring using this virtual composer. In order to cover various users’ arbitrary wiring input, Scene Access Interface (SAI) is used for the implementation. Once the trainees complete wiring, the device I/O code table is generated internally corresponding to the wiring configuration, which is delivered to virtual PLC component.
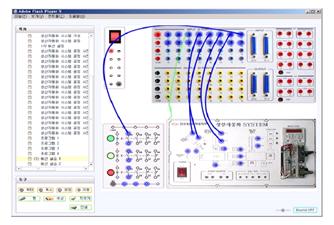
Fig 3. A screen shot of wiring practice using the virtual composer

Fig 4. An example of the internal device I/O code generated corresponding to the wiring The virtual composer unit of virtual sensor
(ii) VIRTUAL PLC:
The virtual PLC replaces the actual PLC unit. To substitute the real one, the virtual PLC should have role in determining (inferring) the action and generating the command corresponding to the input as the real one does. The virtual PLC is designed based on the same structure of real PLC as it should mimic the real one. Next, we need a virtual ladder tool that provides a usage environment including writing PLC ladder programs similar to the actual ladder environment while satisfying the dedicated ladder tool for virtual PLC. Based on this requirement, we developed a ladder tool for programming ladders that can be loaded into virtual PLC. Ladder diagram (LD) into instruction list (IL) can be transformed based on Specifications of the functions supported by the ladder tool are based on the international standard IEC61131-3. The virtual ladder tool supports some kinds of PLCs including Mitsubishi and LS but does not support all the kinds of PLCs.
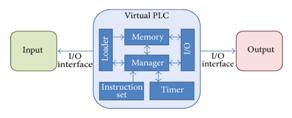
Fig 5. Structure of the virtual PLC
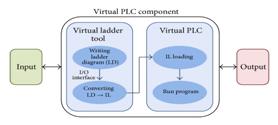
Fig 6. Command interaction flow between input and output by the virtual PLC
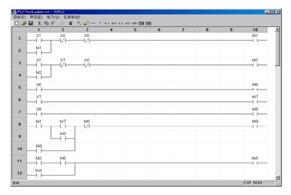
Fig 7. An example of the generic virtual tool implemented for the virtual PLC
(iii) VIRTUAL ACTUATOR:
This virtual actuator has roles in generating three-dimensional (3D) virtual environment of the resultant output and simulating what is built. 3D virtual environment visualization including virtual equipments corresponding to the trainee’s wiring input configuration (done by the virtual composer component) provides the trainee with reality and immersion as if he/she were in real factory automation environment, which may enhance the training effectiveness. Simulation produced by the virtual output component allows the trainee to experience the results corresponding to his wiring and programming to operate the equipment. Especially, the trainee can verify whether or not the equipment (or system) is integrated and operated correctly by the simulation too. Accurate wiring configuration simulates correct action, whereas incorrect wiring produces a simulation result of faulty action. For instance, virtual sensors sense trainee’s wiring configuration, and once it is determined by virtual PLC whether or not it is accurate, the virtual PLC generates the resultant command, and thus virtual actuator (output equipment) simulates the corresponding action. If either the wiring or programming is incorrect, the system may give a simulation result of faulty action. All the virtual equipments are modeled and implemented based on X3D, the Web3D which is international standard graphic format.
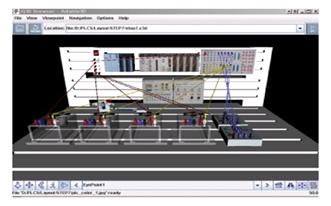
Fig 8. Servo motors control
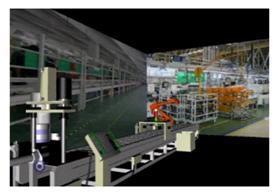
Fig 9.Conveyor control

Fig 10.Elevator control
Some training examples manipulated and controlled by the virtual actuator.
(iv) VIRTUAL NETWORK:
This network has two units: the data network and the interface network. The interface network has role in interacting the data and command between the other three components (virtual sensor, virtual actuator, and virtual PLC). The data network has role in transferring the data of the three components (virtual sensor, virtual actuator, and virtual PLC). In particular, this has role in networking between all the systems of the trainees.
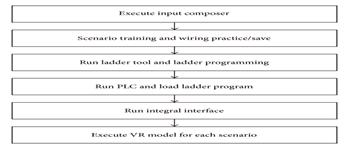
Fig 11. Training practice

Fig 12. Screen shot of a training session using the proposed system
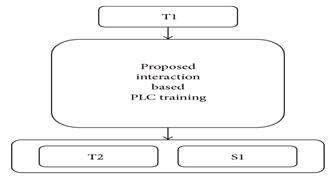
Fig 13.Measurement process using both tests and survey
Overview of experimental setup to a real course.
3. CONCUSION:
In this paper, a new virtual interaction based PLC training system using virtual sensor and actuator was proposed. To provide the hands-on training effects, the proposed system introduced and used virtual sensor (for sensing both user and device inputs), virtual actuator (for actuating/controlling device or equipment), and virtual PLC (for generating command) and was finally implemented with virtual networks (for interfacing the interactions and transferring the data between all the components). Based on the virtual components, the proposed system could allow trainees to operate virtual equipment that models actual (expensive and the latest) equipment such as FA conveyors as if they were moving toward the equipments and manipulate it. As well, the proposed system could offer a training environment without concerns of safety and equipment damage caused from malfunctioning and program errors as it could be conducted in virtual manner. Therefore, if we could improve some aspects, such as user-friendliness and interface, and expand functionality, the system can be more applicable in virtual PLC training programs.
4. ACKNOWLEDGEMENTS:
We owe our profound acknowledgement to all those people who made this paper successful. We present the names of those people to whom we are very much grateful. We would like to express our most sincere thanks to all those people who are involved in my paper work. Any omissions are regretted. We express our deep sense of gratitude to Dr.M.VENKATA RAMANA, Principal, VIGNAN INSTITUTE OF TECHNOLOGY AND SCIENCES(VITS), vignan hills, deshmukhi(V), Nalgonda(Dist).
We express our special gratitude and thanks to Mr N. DINESH KUMAR , HOD(EIE), VITS, Nalgonda, for his kind co-operation without who the paper would not have been completed.
Our sincere thanks to our beloved professors and internal guide for his guidance and contribution in developing the paper.
5. REFERENCES:
1. J. Tan, J. Hao, and S. Wang, “The research and development of the equipment virtual repair training,” Automation Instrumentation, vol. 5, 2007.
2. A. Craig, W. R. Sherman, and J. D. Will, Developing Virtual Reality Applications: Foundations of Effective Design, Morgan Kaufmann Publishers, 2009.
3. D. Brutzman and L. Daly, X3D: Extensible 3D Graphics for Web Authors, Morgan Kaufmann Publishers, 2007.
4. F. J. Varela, E. Thompson, and E. Rosch, The Embodied Mind: Cognitive Science and Human Experience, The MIT
Press,
Cambridge, Mass, USA, 1991.
5. A. M. Gaur, R. Kumar, A. Kumar, and D. S. Rana, “PLC based automatic control of rheometer,”International
Journal of Control and Automation, vol. 3, no. 4, pp. 11–20, 2010.
6. S. Parisi, J. Bauch, J. Berssenbrügge, and R. Radkowski, “Using ontology to create 3D animations for training purposes,” International Journal of Software Engineering and Its Application, vol. 1, no. 1, pp. 67–78, 2007.