
Title: SOS TRANSMISSION-THROUGH CELLULAR PHONES TO SAVE ACCIDENT VICTIMS
Authors: J. Poojasree & M.Harichandana, 1st Year BTech, CSE Department
College: Prakasam Engineering College – Kandukur
1. ABSTRACT:
This paper describes an ORIGINAL IDEA to help cellular phone users caught in an accident. The idea has been developed keeping in mind the considerations of cost and compatibility with existing system. The Short Message Service or SMS as it is popularly referred to, is made use of for this purpose.
The solution offered is the Force-Transducer method. The victim is assumed to be unconscious and the accident is detected automatically. Detailed simulation results at a scaled down level are provided for this solution. The threshold level is set based on data collected from the experiments.
One major problem in such design is the technique to find the victim’s position. The Global Positioning System (GPS) is found to be costly. So, an unorthodox design using Radio Direction Finders (RDF) and beacon signals is described. The Goniometer or Crossed Loop Antenna is used for this purpose. This reduces cost effectively when compared with the GPS system.
The paper proceeds to suggest an abstract view of the software robot required to perform the Save Our Souls (SOS) message routing task. It uses a special hierarchical message dispatch system wherein people nearby and more likely to help are contacted. The robot also acts as a proxy to the victim and monitors responses for him.
This paper as a whole gives a cost-effective, high performance system which can be introduced in the market if any of the cellular companies are willing to encourage it.
2. INTRODUCTION:
Cellular phones are turning out to be a menace on the road. This is a major problem for the cellular phone manufacturers. This paper provides a solution which transmits a SOS signal to save the accident victim. It describes in detail a cost-effective foolproof solution.
There are many factors to be considered when designing such a system. In most of the accidents, the victim becomes unconscious. How is a SOS transmitted then? Here, many ideas can be implemented. One such solution is described here. The cell phone is fitted with a transducer, which detects shocks. The cell phone automatically transmits the SOS if the shock level goes beyond a certain percentage. The cell phone must not trigger an accidental SOS. To ensure this, the shock level that triggers the SOS must be high enough. Based on the first condition, if the shock level is made very high, then an accident might not be identified at all.
Having thus identified the situations in the accident, one needs to understand the actual requirements in each case. They are given below.
The solution requires a software robot resident in the cellular phone provider’s server, which can transmit the SOS signal in an intelligent manner and monitor responses for the victim.
i)Similarly, the solution needs a Positioning System to transmit the victim’s whereabouts to others. This has to be a cheap system and should not increase the cell phone receiver’s cost greatly.
ii)The solution requires a high fidelity shock transducer and decoding circuit to identify the shock magnitude.
iii)The SOS has to be transmitted as soon as possible. So all systems must have a very small time delay.
iv)Above all, the new system must fit in with the present system (i.e.,) there must be no difference in the information received between a user who requests this option and one who does not.
The detailed description of the solution will be presented now.
As seen from the experiment, the average force acting on a toy car in case of an accident is approximately 1N. For a car measuring 960kg and moving at 70kmph speed, the force will be scaled 18000 times or 18kN. These practical results can be verified by a simple theoretical calculation. A car weighing 960kg decelerates from approximately 70kmph to 0kmph in 2 seconds in case of an accident. Hence, the force is given by F =ma which is, 960*70*1000/3600 or 18.67kN approximately. This confirms with the scaled down experimental results. However, in a four-wheeler, all of the total force does not act inside the vehicle. As per information got from Mercedes Benz, only 10% of the total force acts inside the car (Acknowledgement [4]). Thus, the threshold can be set to approximately at 1kN. The scaled down experiment used a cheaper transducer that does not measure high forces. The transducer required for the actual system costs Rs. 1000 a pair. Based on the statistical data collected above, the approximate threshold level is determined. More accurate results can be determined if the experiments are carried in real time to the exact detail.
4. IDENTIFING THE POSITION OF THE VICITM:
The problem of knowing where we are has been an interesting and difficult problem through the ages. Years of research have resulted in the Global Positioning System (GPS). This technique uses three satellites and pin points the location by the triangulation process, wherein the user’s position is located as the point of intersection of the three circles corresponding to the satellites. Installing such a system is quite simple. But the major constraint here is the cost. A normal hand-held GPS costs around $100 and weighs quite heavy. Minimizing the above apparatus will increase the cost further. This would mean an extra cost of Rs.10000 to Rs.15000 for the Indian user.
The better option would be to wait for a SOS signal and then identify the victim’s position. This being a faster technique also makes the design process easy and cheap.
This being the case, one could make use of certain obvious facts to identify the victim. They are,
i) The cell within which the victim is present can be identified easily by the base station. However, this resolution is not enough because the cell can be of a huge size.
ii) Accidents are exceptional cases. They occur rarely. Further, the probability of two users in the same cell getting into an accident is highly improbable.
The system suggested by this paper makes use of a beacon or search signal transmitted by the base station. This is a constant amplitude a.c. signal that fits in the guard band of the respective cell. The signal has the same frequency for all users and so is unsuitable for simultaneous multi-user handling. However, that will be a highly improbable case as reasoned above.
This search signal is sent only if an SOS is identified. So, when a victim sends out his SOS, the base station immediately sends the search signal. The cellular phone is fitted with a small reflector which reflects this signal as such. This is easily achieved by constructing a mismatched termination in the cellular phone for that frequency. Now, the to and fro travel of the signal introduces a time delay. So, from the signal reflected, the user’s distance can be identified.
The information got now gives only the radius of the circle within which the user might be present. This might be too large an area to identify the user even within the cell limits as there is no maximum limit on the cell area. Since we have got the radius, all that is required is to find the angle or direction within which the user might be present. To do this, we use the Radio Direction Finder (RDF) antenna system. This makes use of a highly directional loop antenna to identify the signal source which in this case is the cellular phone.
In order to do this, the cellular phone needs to transmit a microwave signal to the base station. This can be of any frequency that has not been allocated for the existing control frequencies. The base station is then fitted with the CROSSED LOOP or BELLINI TOSI or GONIOMETER type of direction finder. It has been proved mathematically that the meter points to the direction of the signal source (Reference [4])
The user in distress sends out a microwave signal to the base station just as the base station sends its beacon signal. From the reflected beacon signal the radius of the victim’s position is found. From the goniometer, the direction is found as well. This system as assumed above presents a design for only one user. To do this a small electronic system, preferably a microcontroller based system maybe used. Such systems are available widely in the market and so there is no point in trying to design one. Thus, the problem of identifying the victim is overcome. Once the victim’s location is identified, the base station transmits the SOS sent by the cell phone along with his coordinates to the main server. The cell phone thus initiates the process and the base station propagates it.
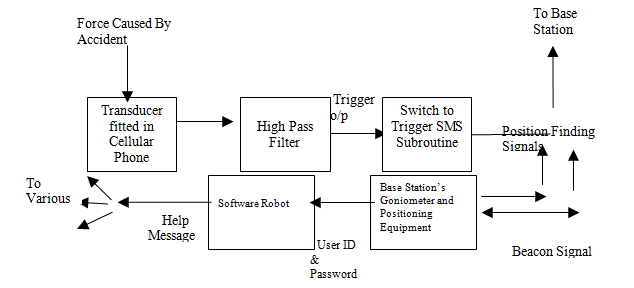
5. COPLETE BLOCK DIAGRAM OF THE SYSTEM
The below diagram depicts the working of the complete system. As seen, the jerk caused by the accident is detected by the shock transducer and the SMS sub-routine is triggered. Along with the message, control signals that inform the base station that an accident has occurred are transmitted. The triggering is achieved by using a high pass filter that detects abrupt changes in the transducer. Simultaneously, the microwave signal for the goniometer is also transmitted. The position is identified as described in the previous section. The user’s id and his position in the polar coordinates are given to the software robot. This robot, then decodes the user’s position to other subscribers based on a priority list.
So far, the hardware design of the system has been dealt with in detail. As mentioned at the start of the paper, a software robot that manages the whole show will have to be designed. This robot is made resident in the main server in the control tower of the cellular service provider. The functions that this robot will have to perform are complex. The algorithm it follows and its code at the highest level of abstraction are explained in the next section.
6. DESIGINING THE SOFTWARE ROBOT:
A software robot is a program that resides in a network (or an environment) and executes a specific task assigned to it. For this purpose, it may move around the environment or contact other software robots in the same or other environments. A software robot is to be designed for this system so as to monitor and transmit the SOS signals in an intelligent manner.
The tasks that are to be performed by the software robot are listed below.
i)It has to transmit the SOS to appropriate persons as will be described.
ii)It has to act in the victim’s place and monitor responses.
iii)It has to check for a confirmation form the victim to avoid false alarms.
This is accomplished by interrogating the victim and waiting for the confirmation. If in a very short time, there is no response, the transmitted SOS must be followed through with a False Alarm message.
Before designing the algorithm, the hierarchy in which the SOS is to be transmitted is to be decided. This takes into account the following factors,
i)The proximity of the help source.
ii)The certainty with which help might be got. For example, a relative whose cell number is present in the victim’s address book would be more likely to help rather than a third person.
Based on the above constraints, a suggested hierarchy of transmitting the SOS is
given below. This is maintained as sets of indices in the agent’s look up table with each index representing one group.
i)Emergency desk of all hospitals in the victim’s cell.
ii)All doctors presently in the victim’s cell.
iii)All subscribers in the victim’s address book that are presently in the cell.
iv)All subscribers in the victim’s cell.
v)Emergency desk of all hospitals in the next nearest cell and so on.
This set of indices in changed in a dynamic fashion by the MAILER DAEMON in
The server. This MAILER DAEMON is normally present in all servers. It is this program that initiates the actual Agent whenever a SOS occurs. The code of the Agent is given in an abstracted level below.
Public void class Agent
{
/* get victim number and position from MAILER DAEMON. Subscriber class
Defines the victim */
Subscriber SOSTransmitter = new Subscriber (MAILERDAEMON.getVictim ( ));
Position victimPosn = new Position (MAILERDAEMON.getPosition ( ));
Boolean processingFlag = True;
Subscriber helpSub;
// lookUP – look up table with all indices
While ((helpSub = readList (lookUp))! =EOF)
{
Send (“HELP” + vicitimPosn, helpSub);
Delay (30); // wait for 30 seconds
Response resp1 = new Response (scanResponse ( ));
If (Response! = NULL)
Exit (0);
}
If (Response == NULL)
//scan response continuously for 120 secs after transmitting to all subscribers
Response = scanResponse (120);
If (Response! = NULL)
Send (“HELP ON THE WAY”, SOSTransmitter); //inform victim of help
Processing Flag = False;
}
The agent given here once started, gets the victim’s id and his position into the respective objects. It then puts each of the indexes from the look up table into its corresponding object and sends the SOS to them. It then monitors the response and informs the victim when somebody responds.
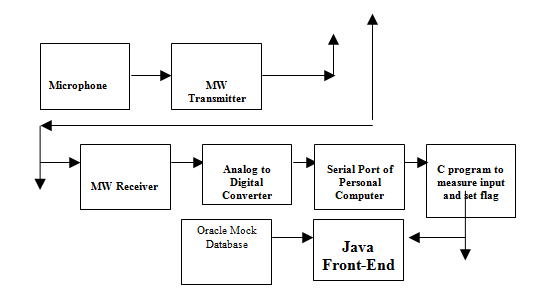
7. SIMULATION:
The simulation of this system has been carried out in a small scale level. As seen from the block diagram a microphone substitutes for the shock transducer in the original system. This then transmitted through a Medium Wave transmitter to a personal computer. The signal received is passed through an ADC and received in a C program. This program checks the signal value and sets a flag variable when it goes beyond a certain level. This flag is continually checked by a thread of the JAVA front-end. If the flag is set, the program connects to the back-end database and displays a list of users to whom the mock message is sent based on the hierarchy explained above. The simulation does not cover the positioning part of the system as that is too expensive to be done on small scale. The screen shot of the Java front-end is shown in the next section.
8. APPROXIMATE COST ANALYSIS OF THE SYSTEM:
1.Cost of installing Goniometer for one base station : Rs. 20,000
2.Number of Base Stations in Chennai City : 50
3.Cost of installing Goniometer for the City : Rs. 10,00,000
4.Cost of other hardware and software (for total city) : Rs. 1,00,000
5.Number of subscribers in Coimbatore city : 10,000 ( Assumed Value )
6.Cost per Subscriber : Rs. 110
7.Cost of Transducer fitted in the Cell Phone : Rs. 1,000
8.Cost of other hardware in the Cell Phone : Rs. 1,000
9. Total Cost Per Subscriber : Rs. 2,110 (Approximate)
It is thus seen that allowing for the widest possible cost; the total increase is only Rs.2110 which is a good price when considering the fact that the system saves the life of the subscriber.
9.CONCLUSION
The system though complete presents a few limitations. They are, the system requires the user to place the cellular phone in a stand or connect the transducer to the vehicle in case of four wheelers. Though this might seem as if taking choice from the user, the fact that the system deals with a question of life or death is more important. The system needs detailed surveying to decode the position of the user in polar coordinates to actual localities. This however is a one time job. The system does not handle multiple victims simultaneously. However, priority can be allocated to users based on the force measured. False alarms are bound to occur in such a system. This can be reduced by ringing the cellular phone every time an SOS is sent and thereby warning the user. The data collected are approximate. However, accurate data can be collected if the system is tested in real time as a commercial venture.
Thus, if implemented this system would prove to be a boon to all the people out there driving with hands-free earphone in their ears.
REFERENCE:
[1] Helfrick and Cooper, Electronics Measurements and Instrumentation
[2] Raj Pandya, Personal Mobile Communication Systems and Services
[3] Thiagarajan Viswanathan, Telecommunication and Switching Systems
[4] K.D.Prasad, Antennas and Wave Propagation
[5] George Kennedy, Electronic Communication Systems